A
high-pass filter (
HPF) is an electronic filter that passes signals with a frequency higher than a certain cutoff frequency and attenuates signals with frequencies lower than the cutoff frequency. The amount of attenuation for each frequency depends on the filter design. A high-pass filter is usually modeled as a linear time-invariant system. It is sometimes called a
low-cut filter or
bass-cut filter. High-pass filters have many uses, such as blocking DC from circuitry sensitive to non-zero average voltages or radio frequency devices. They can also be used in conjunction with a low-pass filter to produce a bandpass filter.
First-order continuous-time implementation
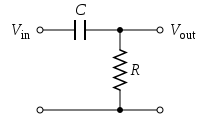
Figure 1: A passive, analog, first-order high-pass filter, realized by an RC circuit
The simple first-order electronic high-pass filter shown in Figure 1 is implemented by placing an input voltage across the series combination of a capacitor and a resistor and using the voltage across the resistor as an output. The product of the resistance and capacitance (
R×
C) is the time constant (τ); it is inversely proportional to the cutoff frequency
fc, that is,

where
fc is in hertz,
τ is in seconds,
R is in ohms, and
C is in farads.

Figure 2: An active high-pass filter
Figure 2 shows an active electronic implementation of a first-order high-pass filter using an operational amplifier. In this case, the filter has a passband gain of -
R2/
R1 and has a cutoff frequency of

Because this filter is active, it may have non-unity passband gain. That is, high-frequency signals are inverted and amplified by
R2/
R1.
Discrete-time realization
For another method of conversion from continuous- to discrete-time, see Bilinear transform.
Discrete-time high-pass filters can also be designed. Discrete-time filter design is beyond the scope of this article; however, a simple example comes from the conversion of the continuous-time high-pass filter above to a discrete-time realization. That is, the continuous-time behavior can be discretized.
From the circuit in Figure 1 above, according to Kirchhoff's Laws and the definition of capacitance:

where

is the charge stored in the capacitor at time

. Substituting Equation (Q) into Equation (I) and then Equation (I) into Equation (V) gives:

This equation can be discretized. For simplicity, assume that samples of the input and output are taken at evenly spaced points in time separated by

time. Let the samples of

be represented by the sequence

, and let

be represented by the sequence

which correspond to the same points in time. Making these substitutions:

And rearranging terms gives the recurrence relation

That is, this discrete-time implementation of a simple continuous-time RC high-pass filter is

By definition,

. The expression for parameter

yields the equivalent time constant

in terms of the sampling period
and
:
 .
.
Recalling that
 so
so 
then
and

are related by:

and
 .
.
If

, then the
time constant equal to the sampling period. If

, then
is significantly smaller than the sampling interval, and

.
Algorithmic implementation
The filter recurrence relation provides a way to determine the output samples in terms of the input samples and the preceding output. The following pseudocode algorithm will simulate the effect of a high-pass filter on a series of digital samples:



No comments:
Post a Comment